This post shows how to interface PIC16F84A microcontroller with HC-SR04 ultrasonic sensor and make a distance meter.
The ultrasonic sensor HC-SR04 can measure distances form 2cm to 400cm with an accuracy of 3mm. This sensor module includes ultrasonic transmitter, ultrasonic receiver and control circuit.
The HC-SR04 ultrasonic sensor has 4 pins as shown below where:
VCC – Positive power supply (+5V)
Trig – Trigger input pin
Echo – Echo output pin
GND – Ground (0V)

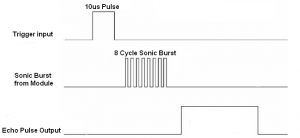
HC-SR04 ultrasonic sensor timing diagram:
The timing diagram of the HC-SR04 ultrasonic sensor is shown below.
First we have to supply the sensor trigger pin with a pulse of 10µs and the sensor will automatically send 8 cycles burst of ultrasound at 40 kHz and raise its echo pin. The Echo is a distance object that is pulse width and the range in proportion. You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 =inch; or:
the range = high level time * velocity (340M/S) / 2.
PIC16F84A with HC-SR04 ultrasonic sensor example circuit:
The following circuit schematic show he connection between the microcontroller PIC16F84A and the HC-SR04 sensor.
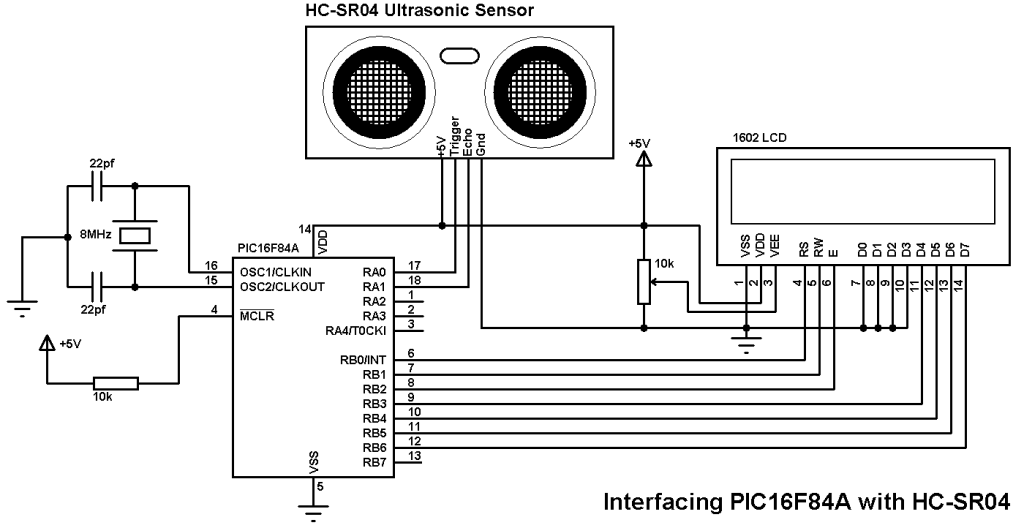
The 1602 LCD is used to display the measured distance in cm.
PIC16F84A with HC-SR04 ultrasonic sensor example CCS C code:
Here is the C code used for this project.
Timer0 is configured to increment by 1 every 1 us ( with mcu frequency of 8MHz). Timer0 is used the measure the pulse widths come from Echo pin of the HC-SR04 sensor.
Because of the Timer0 is an 8-bit timer only I used its interrupt (Timer0 interrupt) to count times more than 256us, and for that purpose I added a variable called count. So the pulse time of the Echo pin equals to :
count * 256 + get_timer0()
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 | // Interfacing PIC16F84A with HC-SR04 ultrasonic sensor CCS C code //LCD module connections #define LCD_RS_PIN PIN_B0 #define LCD_RW_PIN PIN_B1 #define LCD_ENABLE_PIN PIN_B2 #define LCD_DATA4 PIN_B3 #define LCD_DATA5 PIN_B4 #define LCD_DATA6 PIN_B5 #define LCD_DATA7 PIN_B6 //End LCD module connections #include <16F84A.h> #fuses HS,NOWDT,PUT,NOPROTECT #use delay(clock = 8000000) #include <lcd.c> #use fast_io(A) unsigned int8 count; unsigned int16 i, distance; #INT_TIMER0 void timer0_isr(){ count++; clear_interrupt(INT_TIMER0); } int1 wait_sensor(){ i = 0; set_timer0(0); count = 0; // Reset Timer0 while(!input(PIN_A1) && (i < 1000)) i = count * 256 + get_timer0(); if(i > 990) return 0; else return 1; } unsigned int16 get_distance(){ i = 0; set_timer0(0); count = 0; while(input(PIN_A1) && (i < 25000)) i = count * 256 + get_timer0(); return i; } void main(){ output_a(0); set_tris_a(2); // Configure RA1 as input lcd_init(); // Initialize LCD module lcd_putc('\f'); // LCD clear clear_interrupt(INT_TIMER0); enable_interrupts(GLOBAL); enable_interrupts(INT_TIMER0); setup_timer_0 (T0_INTERNAL | T0_DIV_2); // Configure Timer0 module lcd_gotoxy(4, 1); // Go to column 4 row 1 lcd_putc("Distance:"); while(TRUE){ // Send 10us pulse to HC-SR04 Trigger pin output_high(PIN_A0); delay_us(10); output_low(PIN_A0); // Read pulse comes from HC-SR04 Echo pin if(wait_sensor()) { distance = get_distance(); if(distance > 24990) { lcd_gotoxy(3, 2); // Go to column 3 row 2 lcd_putc("Out Of Range"); } else { distance = i/58; // Calculate the distance lcd_gotoxy(3, 2); // Go to column 3 row 2 lcd_putc(" cm "); lcd_gotoxy(6, 2); // Go to column 6 row 2 printf(lcd_putc,"%3Lu",distance); } } else { lcd_gotoxy(3, 2); // Go to column 3 row 2 lcd_putc(" Time Out "); } delay_ms(100); } } |
Example Video:
Discover more from Simple Circuit
Subscribe to get the latest posts sent to your email.
i did not get 256
Is there any chance i could get the .hex file to upload to PICkit or a tutorial how to upload it to the PIC 16f84a