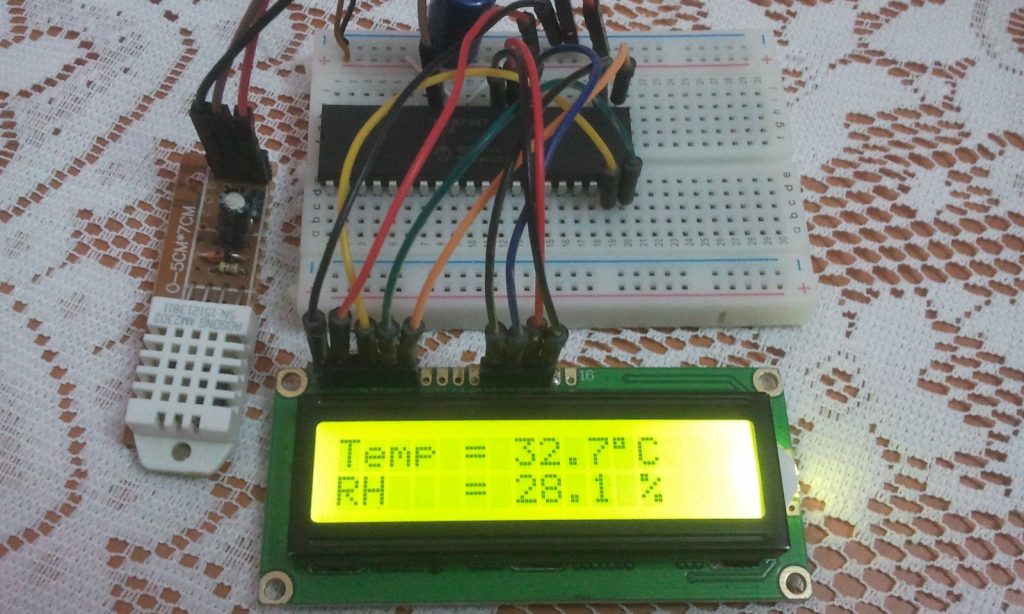
This mini project shows the interfacing of PIC16F887 microcontroller with DHT11 (RHT01) digital humidity and temperature sensor.
In this post I’m not going to give any details about the DHT11 sensor because every thing is in the datasheet of the device which can be downloaded from the following link:
DHT11 Datasheet Download
Hardware Required:
- PIC16F887 Microcontroller
- DHT11 Sensor
- 1602 LCD screen
- 10K Potentiometer
- 4.7K ohm resistor
- 0.1µF Ceramic capacitor (Optional but recommended)
- +5V Power source
- Breadboards
- Jumper wires
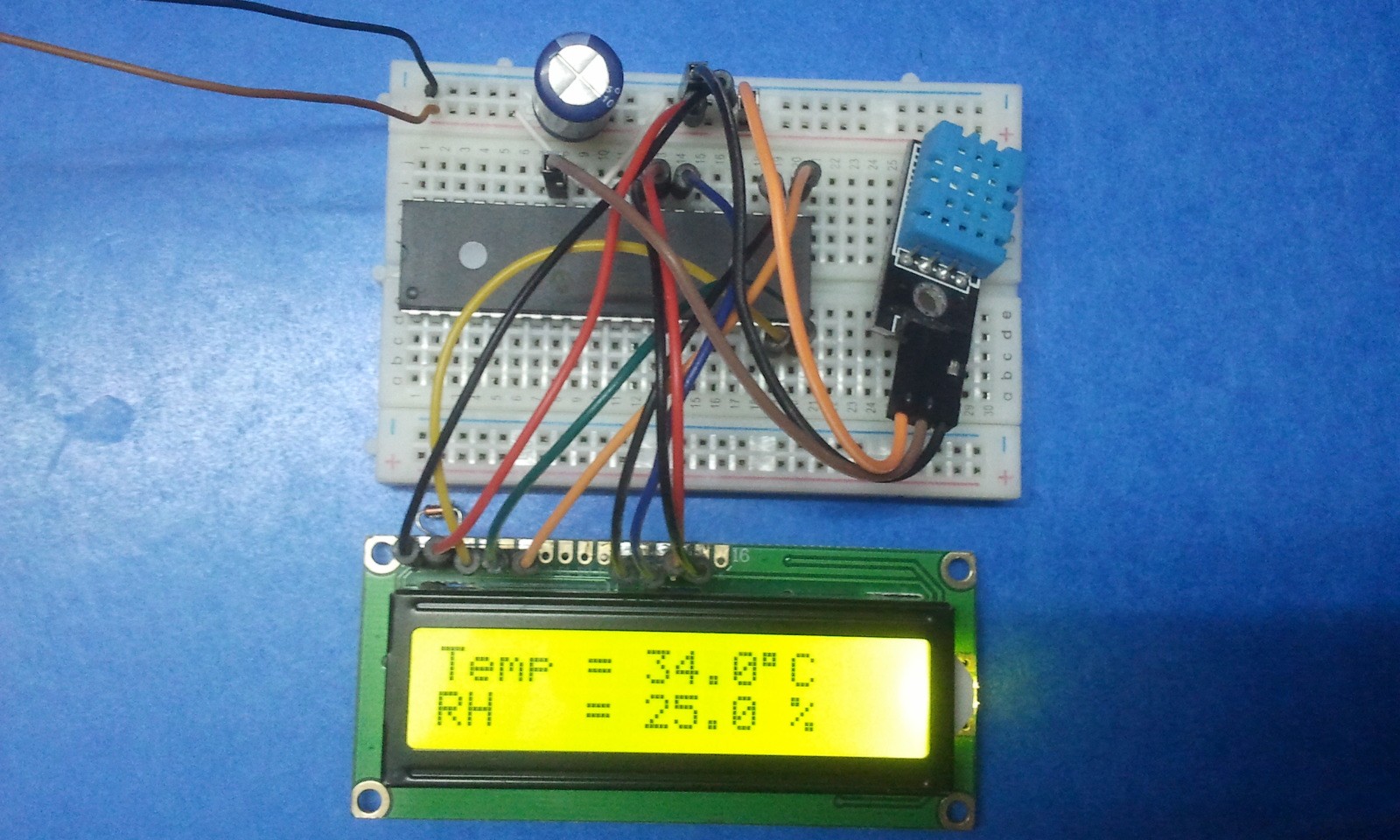
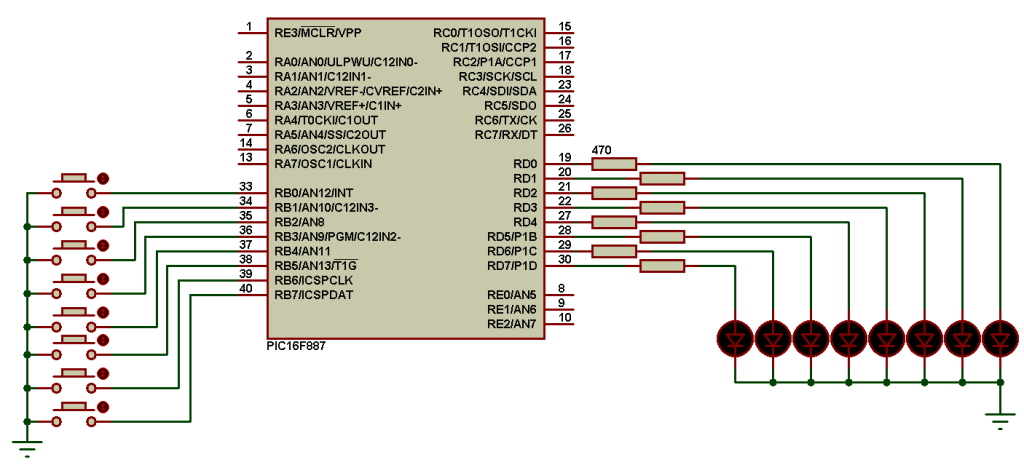
Interfacing PIC16F887 with DHT11 digital sensor circuit:
Project circuit diagram is below.
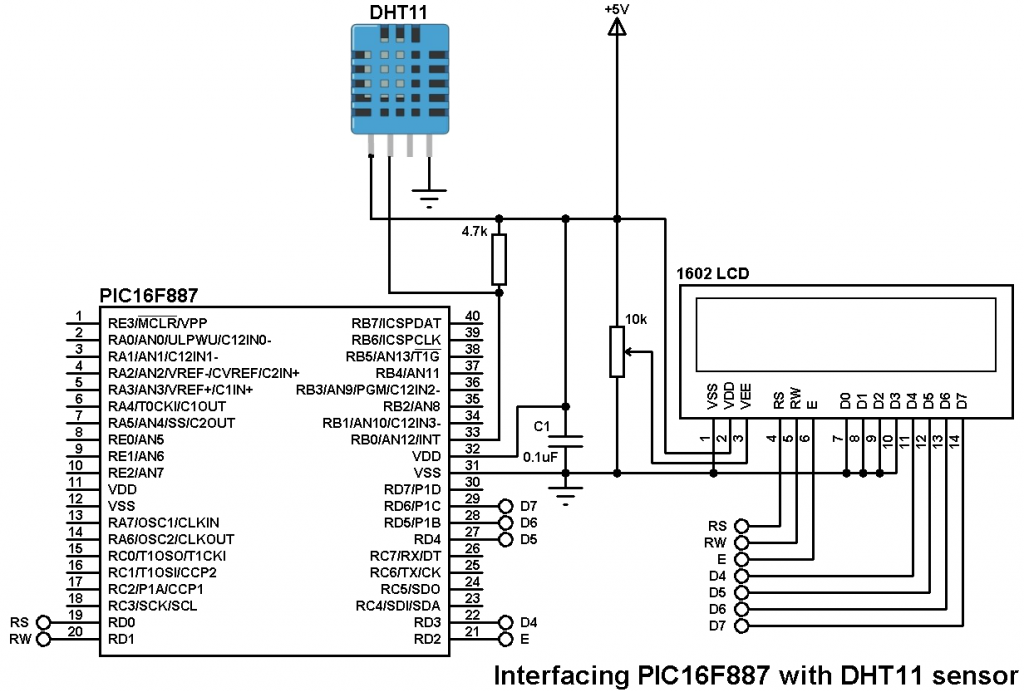
The internal oscillator of the microcontroller is used and MCLR pin function is disabled.
Interfacing PIC16F887 with DHT11 sensor CCS C code:
Reading the datasheet of the DHT11 sensor is recommended for understanding the source code.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 | /* Interfacing PIC16F887 with DHT11 sensor CCS C code Read DHT11 datasheet to understand the code! Internal oscillator used @ 8MHz Timer1 is configured so that it increments every 1µs */ //LCD module connections #define LCD_RS_PIN PIN_D0 #define LCD_RW_PIN PIN_D1 #define LCD_ENABLE_PIN PIN_D2 #define LCD_DATA4 PIN_D3 #define LCD_DATA5 PIN_D4 #define LCD_DATA6 PIN_D5 #define LCD_DATA7 PIN_D6 //End LCD module connections #include <16F887.h> #fuses NOMCLR NOBROWNOUT NOLVP INTRC_IO #use delay(clock = 8MHz) #include <lcd.c> #use fast_io(B) #use fast_io(D) #define DHT11_PIN PIN_B0 // DHT11 Data pin is connected to RB0 char message1[] = "Temp = 00.0 C "; char message2[] = "RH = 00.0 % "; short Time_out = 0; unsigned int8 T_byte1, T_byte2, RH_byte1, RH_byte2, CheckSum ; void start_signal(){ output_drive(DHT11_PIN); // Configure connection pin as output output_low(DHT11_PIN); // Connection pin output low delay_ms(25); output_high(DHT11_PIN); // Connection pin output high delay_us(25); output_float(DHT11_PIN); // Configure connection pin as input } short check_response(){ set_timer1(0); // Set Timer1 value to 0 setup_timer_1(T1_INTERNAL | T1_DIV_BY_2); // Start Timer1 with internal clock source + 2 prescaler while(!input(DHT11_PIN) && get_timer1() < 100); // Wait until DHT11_PIN becomes high (cheking of 80µs low time response) if(get_timer1() > 99) // If response time > 99µS ==> Response error return 0; // Return 0 (Device has a problem with response) else{ set_timer1(0); // Set Timer1 value to 0 while(input(DHT11_PIN) && get_timer1() < 100); // Wait until DHT11_PIN becomes low (cheking of 80µs high time response) if(get_timer1() > 99) // If response time > 99µS ==> Response error return 0; // Return 0 (Device has a problem with response) else return 1; // Return 1 (response OK) } } unsigned int8 Read_Data(){ unsigned int8 i, _data = 0; if(Time_out) break; for(i = 0; i < 8; i++){ set_timer1(0); // Set Timer1 value to 0 while(!input(DHT11_PIN)) // Wait until DHT11_PIN becomes high if(get_timer1() > 100){ // If low time > 100 ==> Time out error (Normally it takes 50µs) Time_out = 1; break; } set_timer1(0); // Set Timer1 value to 0 while(input(DHT11_PIN)) // Wait until DHT11_PIN becomes low if(get_timer1() > 100){ // If high time > 100 ==> Time out error (Normally it takes 26-28µs for 0 and 70µs for 1) Time_out = 1; break; } if(get_timer1() > 50) // If high time > 50 ==> Sensor sent 1 bit_set(_data, (7 - i)); // Set bit (7 - i) } return _data; } void main(){ setup_oscillator(OSC_8MHZ); // Set the internal oscillator to 8MHz setup_timer_1(T1_DISABLED); // Disable Timer1 lcd_init(); // Initialize LCD module lcd_putc('\f'); // Clear LCD while(TRUE){ delay_ms(1000); // Wait 1s Time_out = 0; Start_signal(); // Send start signal to the sensor if(check_response()){ // Check if there is a response from sensor (If OK start reding humidity and temperature data) RH_byte1 = Read_Data(); // read RH byte1 RH_byte2 = Read_Data(); // read RH byte2 T_byte1 = Read_Data(); // read T byte1 T_byte2 = Read_Data(); // read T byte2 Checksum = Read_Data(); // read checksum setup_timer_1(T1_DISABLED); // Disable Timer1 if(Time_out) { // If there is a time out in reading lcd_putc('\f'); // LCD clear lcd_gotoxy(5, 1); // Go to column 5 row 1 lcd_putc("Time out!"); // Display "Time out!" } else { // If there is no time out if(CheckSum == ((RH_Byte1 + RH_Byte2 + T_Byte1 + T_Byte2) & 0xFF)){ message1[7] = T_Byte1/10 + 48; message1[8] = T_Byte1%10 + 48; message1[10] = T_Byte2/10 + 48; message2[7] = RH_Byte1/10 + 48; message2[8] = RH_Byte1%10 + 48; message2[10] = RH_Byte2/10 + 48; message1[11] = 223; // Degree symbol lcd_gotoxy(1, 1); // Go to column 1 row 1 printf(lcd_putc, message1); // Display message1 lcd_gotoxy(1, 2); // Go to column 1 row 2 printf(lcd_putc, message2); // Display message2 } else { lcd_putc('\f'); // LCD clear lcd_gotoxy(1, 1); // Go to column 1 row 1 lcd_putc("Checksum Error!"); } } } else { // If there is no response from DHT11 lcd_putc('\f'); // LCD clear lcd_gotoxy(3, 1); // Go to column 3 row 1 lcd_putc("No response"); lcd_gotoxy(1, 2); // Go to column 1 row 2 lcd_putc("from the sensor"); } } } |
DHT11 With PIC16F887 microcontroller simulation video:
Source code, hex and Proteus simulation files can be downloaded from the following link.
Download
Discover more from Simple Circuit
Subscribe to get the latest posts sent to your email.