This topic shows how to interface PIC18F4550 microcontroller with DHT22 sensor with hardware circuit.
Related topic:
The following topic shows PIC18F4550 microcontroller and DHT22 Proteus simulation with some details about this sensor.
PIC18F4550 microcontroller and DHT22(AM2302) sensor circuit + Proteus simulation
Interfacing PIC18F4550 with DHT22(AM2302 – RHT03) sensor circuit:
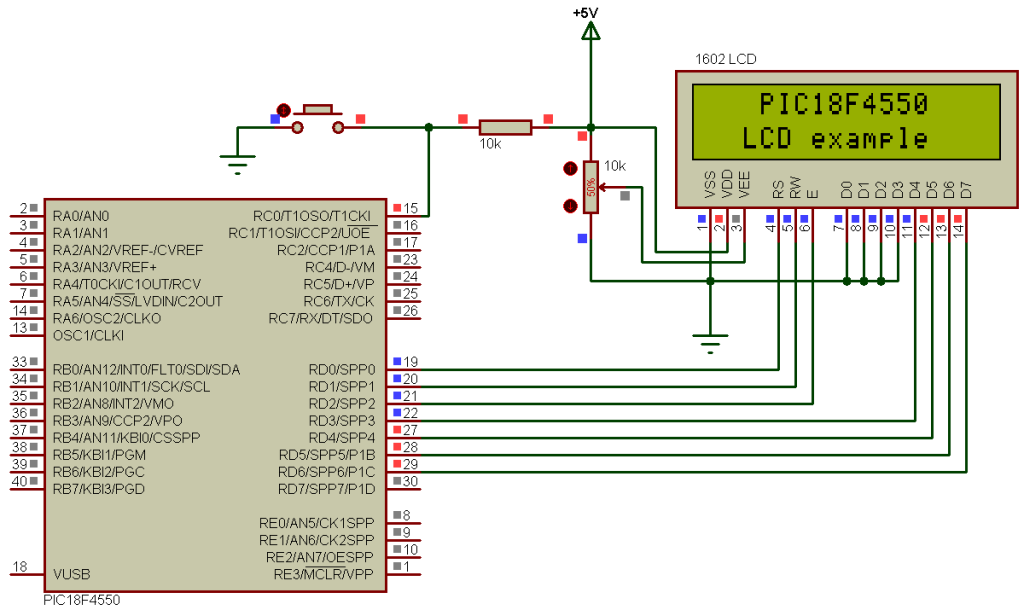
The following circuit schematic shows complete project circuit.
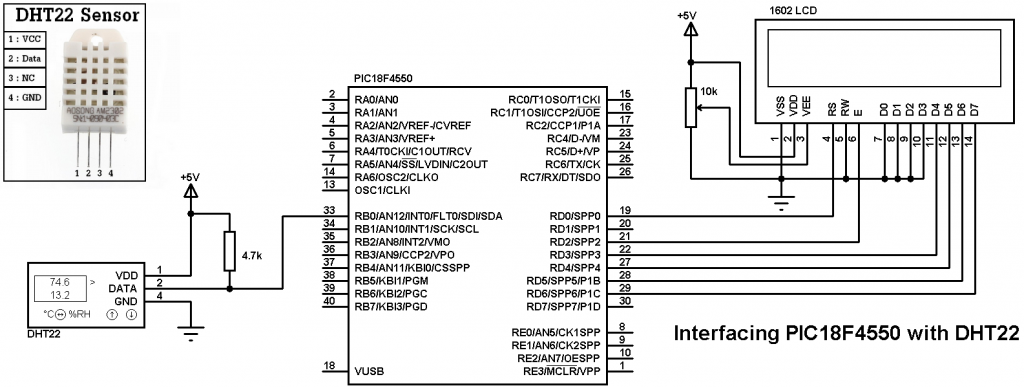
The circuit is simple, there is the microcontroller PIC18F4550, DHT22 sensor and 1602 LCD to display humidity and temperature results.
PIC18F4550 uses its internal oscillator @ 8MHz and mclr pin function is disabled.
Interfacing PIC18F4550 with DH22 (AM2302-RHT03) sensor CCS C code:
The interfacing code is written with CCS PIC C compiler PCWHD version 5.051.
If you want to understand the code please read the DHT22 datasheet.
Variables Time_out and k are used to test reading time to avoid wrong data reception or microcontroller hanging.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 | // Interfacing PIC18F4550 with DHT22(AM2302 - RHT03) sensor CCS C code // http://ccspicc.blogspot.com/ // electronnote@gmail.com //LCD module connections #define LCD_RS_PIN PIN_D0 #define LCD_RW_PIN PIN_D1 #define LCD_ENABLE_PIN PIN_D2 #define LCD_DATA4 PIN_D3 #define LCD_DATA5 PIN_D4 #define LCD_DATA6 PIN_D5 #define LCD_DATA7 PIN_D6 //End LCD module connections #include <18F4550.h> #fuses NOMCLR INTRC_IO #use delay(clock = 8000000) #include #use fast_io(B) // Connection pin between PIC18F4550 and DHT22 sensor #BIT Data_Pin = 0xF81.0 // Pin mapped to PORTB.0 #BIT Data_Pin_Direction = 0xF93.0 // Pin direction mapped to TRISB.0 char message1[] = "Temp = 00.0 C"; char message2[] = "RH = 00.0 %"; short Time_out ; unsigned int8 T_byte1, T_byte2, RH_byte1, RH_byte2, CheckSum ; unsigned int16 Temp, RH; void start_signal(){ Data_Pin_Direction = 0; // Configure connection pin as output Data_Pin = 0; // Connection pin output low delay_ms(25); Data_Pin = 1; // Connection pin output high delay_us(30); Data_Pin_Direction = 1; // Configure connection pin as input } short check_response(){ delay_us(40); if(!Data_Pin){ // Read and test if connection pin is low delay_us(80); if(Data_Pin){ // Read and test if connection pin is high delay_us(50); return 1;} } } unsigned int8 Read_Data(){ unsigned int8 i, k, _data = 0; // k is used to count 1 bit reading duration if(Time_out) break; for(i = 0; i < 8; i++){ k = 0; while(!Data_Pin){ // Wait until pin goes high k++; if (k > 100) {Time_out = 1; break;} delay_us(1);} delay_us(30); if(!Data_Pin) bit_clear(_data, (7 - i)); // Clear bit (7 - i) else{ bit_set(_data, (7 - i)); // Set bit (7 - i) while(Data_Pin){ // Wait until pin goes low k++; if (k > 100) {Time_out = 1; break;} delay_us(1);} } } return _data; } void main(){ setup_oscillator(OSC_8MHZ); // Set internal oscillator to 8MHz setup_adc_ports(NO_ANALOGS); // Configure AN pins as digital lcd_init(); // Initialize LCD module lcd_putc('f'); // LCD clear while(TRUE){ delay_ms(1000); Time_out = 0; Start_signal(); if(check_response()){ // If there is response from sensor RH_byte1 = Read_Data(); // read RH byte1 RH_byte2 = Read_Data(); // read RH byte2 T_byte1 = Read_Data(); // read T byte1 T_byte2 = Read_Data(); // read T byte2 Checksum = Read_Data(); // read checksum if(Time_out){ // If reading takes long time lcd_putc('f'); // LCD clear lcd_gotoxy(5, 1); // Go to column 5 row 1 lcd_putc("Time out!"); } else{ if(CheckSum == ((RH_Byte1 + RH_Byte2 + T_Byte1 + T_Byte2) & 0xFF)){ RH = RH_byte1; RH = (RH << 8) | RH_byte2; Temp = T_byte1; Temp = (Temp << 8) | T_byte2; if (Temp > 0X8000){ message1[6] = '-'; Temp = Temp & 0X7FFF; } else message1[6] = ' '; message1[7] = (Temp / 100) % 10 + 48; message1[8] = (Temp / 10) % 10 + 48; message1[10] = Temp % 10 + 48; message2[7] = (RH / 100) % 10 + 48; message2[8] = (RH / 10) % 10 + 48; message2[10] = RH % 10 + 48; message1[11] = 223; // Degree symbol lcd_putc('f'); // LCD clear lcd_gotoxy(1, 1); // Go to column 1 row 1 printf(lcd_putc, message1); // Display message1 lcd_gotoxy(1, 2); // Go to column 1 row 2 printf(lcd_putc, message2); // Display message2 } else { lcd_putc('f'); // LCD clear lcd_gotoxy(1, 1); // Go to column 1 row 1 lcd_putc("Checksum Error!"); } } } else { lcd_putc('f'); // LCD clear lcd_gotoxy(3, 1); // Go to column 3 row 1 lcd_putc("No response"); lcd_gotoxy(1, 2); // Go to column 1 row 2 lcd_putc("from the sensor"); } } } |
Interfacing PIC18F4550 with DHT22 sensor video:
The following video shows hardware circuit of this project.
Discover more from Simple Circuit
Subscribe to get the latest posts sent to your email.
Please I am simulated de code in proteus PIC18F4550 but have a error
“Logic contention(s) detected on net” do you please send de Proteus for me?
my email is neisjb@hotmail.com or cell phone my whatsapp is (55)48984944412
Thanks!