In the following topic URL we’ve seen how to control BLDC motor speed and direction of rotation using PIC18F4550 microcontroller and 3-phase bridge circuit:
CD-ROM Spindle motor (BLDC) control with PIC18F4550 – CCS C
This topic shows how to make the same controller using L293D motor driver instead of the 3-phase bridge circuit.
The 3 phase bridge is more complicated and expansive and while the L293D motor driver chip is a small, cheap and saves time.
In this project we need two L293D chips because the BLDC motor is a three phase motor, and at any time two windings energized while the third one floating.
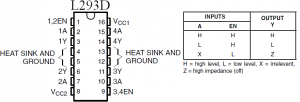
The L293D has 4 inputs and 4 outputs with 2 enable pins, each enable pin controls 2 outputs as shown below:
Complete circuit schematic is shown below:
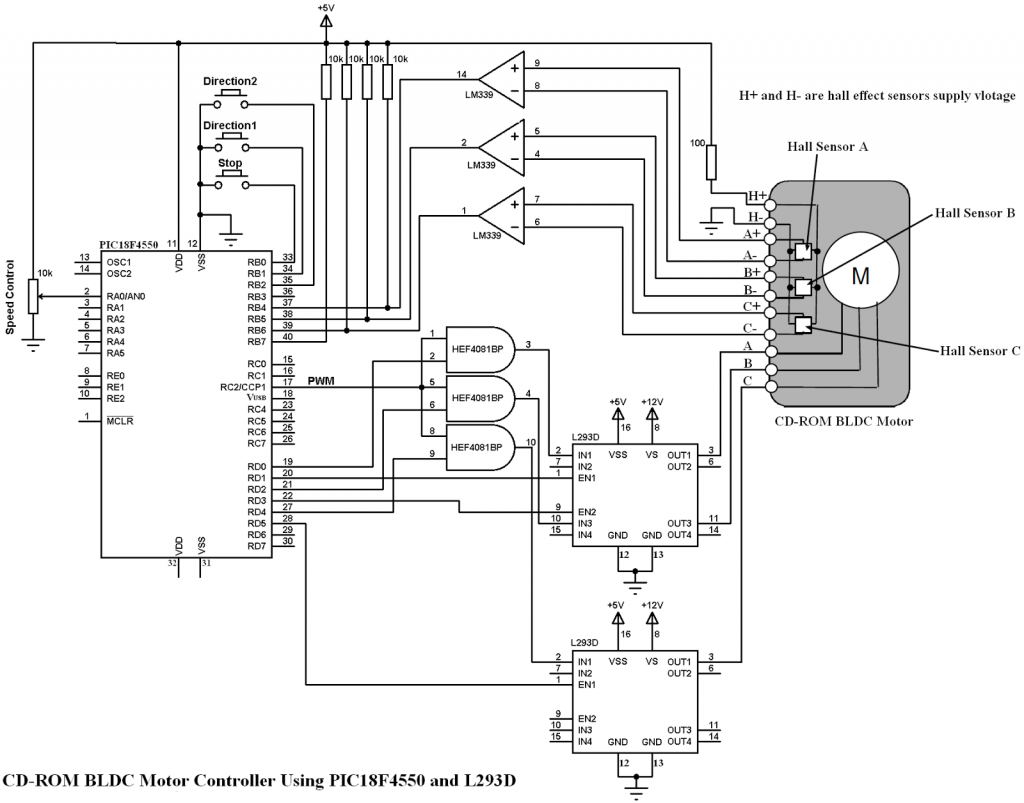
In the circuit there are 3 buttons connected to RB0, RB1 and RB2. The buttons connected to RB1 and RB2 are used to start the BLDC motor and the other button is a stop button.
The BLDC motor speed is controlled using a potentiometer connected to AN0 channel.
There are 3 AND gates (HEF4081BP) in the circuit, these gates are used to get a 3 PWM signals from the original one which comes from RC2 pin using CCP1 module.
HEF4081BP has 4 independent 2-input AND gates, three of them are used. This IC needs a supply voltage of +5V between pins 7 (GND) and 14 (VCC).
PIC18F4550 microcontroller internal oscillator is used (8MHz).
BLDC Motor control using PIC18F4550 and L293D CCS PIC C code:
The C code below was tested with CCS C compiler version 5.051.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 | // Sensored BLDC motor controller using PIC18F4550 and L293D CCS C code #include <18F4550.h> #device ADC = 10 #fuses NOMCLR INTRC_IO #use delay(clock = 8000000) #use fast_io(B) #use fast_io(D) int8 hall, Direction = 0; int8 MoveTable1[8] = {0, 50, 11, 56, 44, 14, 35, 0}; int8 MoveTable2[8] = {0, 35, 14, 44, 56, 11, 50, 0}; #INT_RB // RB port interrupt on change void rb_isr(void){ hall = (input_b() >> 4) & 7; if(Direction == 1) output_d(MoveTable1[hall]); else output_d(MoveTable2[hall]); clear_interrupt(INT_RB); } void main(){ setup_oscillator(OSC_8MHZ); // Set internal oscillator to 8MHz setup_adc_ports(AN0); // Configure RA0 (AN0) pin as analog output_b(0); // PORTB initial state set_tris_b(0xF7); // TRISB configurartion port_b_pullups(TRUE); // Enable PORTB internal pull-ups output_d(0); // PORTD initial state set_tris_d(0); // Configure PORTD pins as outputs setup_adc(ADC_CLOCK_DIV_8); // Set ADC conversion time to 64Tosc set_adc_channel(0); // Select channel 0 input setup_timer_2(T2_DIV_BY_1, 199, 1); // Timer2 configuration for PWM setup_ccp1(CCP_OFF); enable_interrupts(GLOBAL); // Enable global interrupts while(TRUE){ if(!input(PIN_B1)){ // If RB1 button pressed if(Direction == 0){ Direction = 1; setup_ccp1(CCP_PWM); // Configure CCP1 as a PWM clear_interrupt(INT_RB); // Clear RB IOC flag bit enable_interrupts(INT_RB); // Enable PORTB IOC hall = (input_b() >> 4) & 7; output_d(MoveTable1[hall]); } } if(!input(PIN_B2)){ // If RB1 button pressed if(Direction == 0){ Direction = 2; setup_ccp1(CCP_PWM); // Configure CCP1 as a PWM clear_interrupt(INT_RB); // Clear RB IOC flag bit enable_interrupts(INT_RB); // Enable PORTB IOC hall = (input_b() >> 4) & 7; output_d(MoveTable2[hall]); } } while(Direction != 0){ set_pwm1_duty(read_adc()); if(!input(PIN_B0)){ disable_interrupts(INT_RB); // Disable PORTB IOC output_d(0); setup_ccp1(CCP_OFF); // CCP1 OFF Direction = 0; } } } } |
BLDC Motor controller using PIC18F4550 and L293D video:
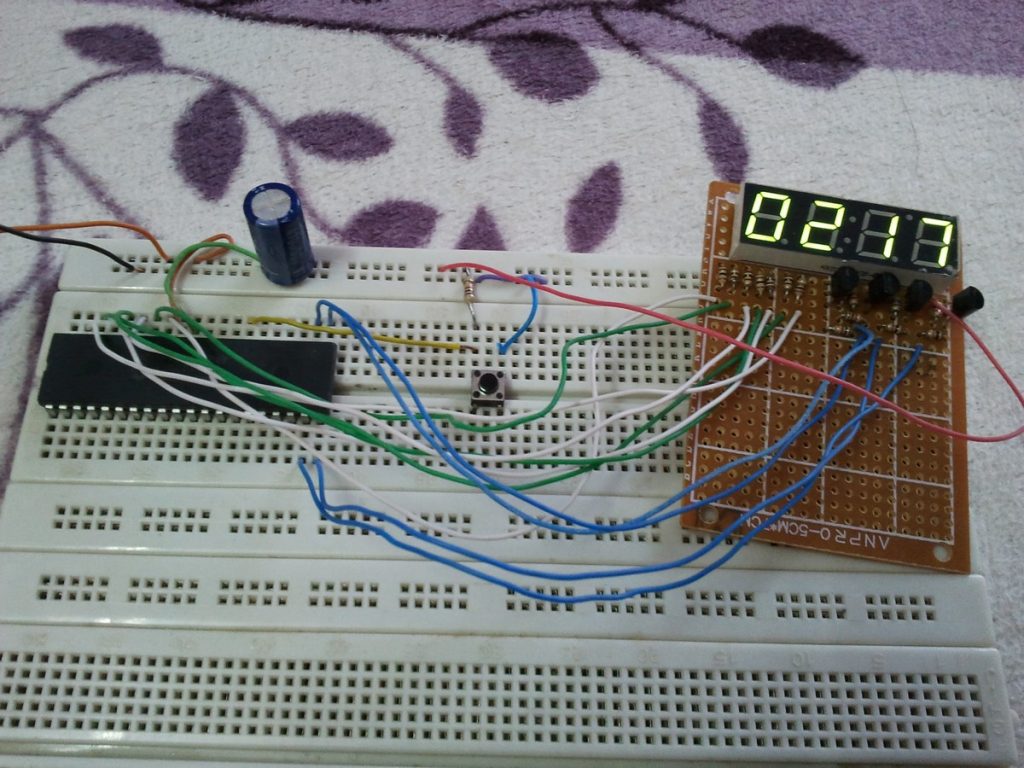
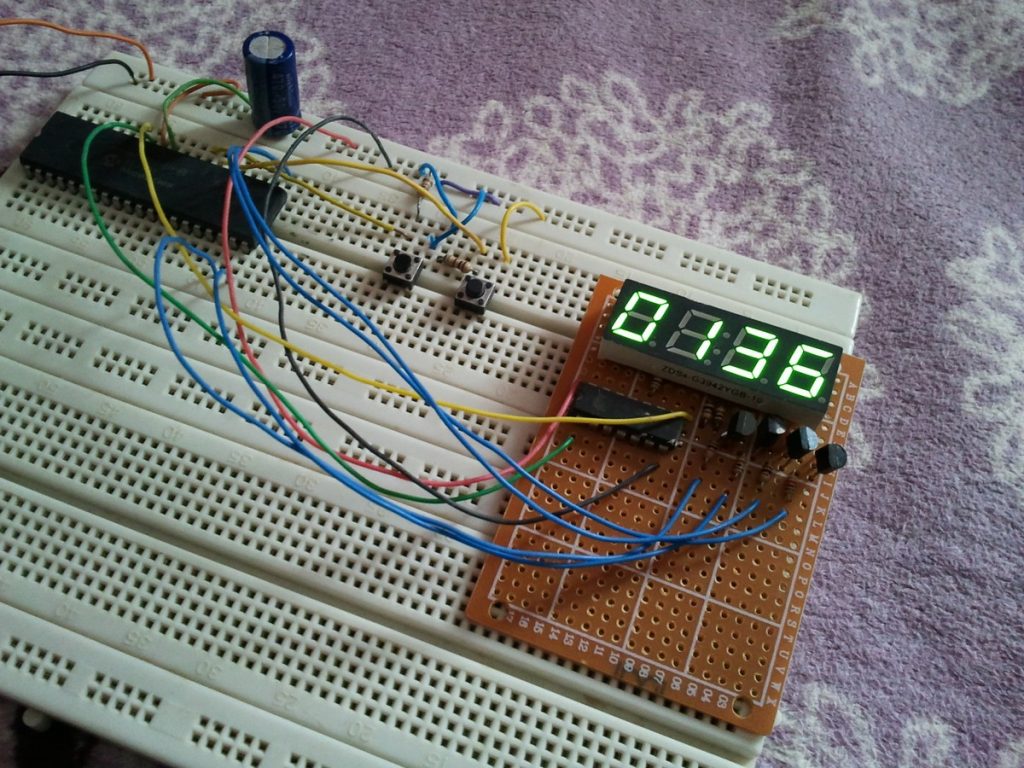
The following video shows project hardware circuit.
References:
Microchip: Sensored BLDC Motor Control Using dsPIC30F2010 (AN957).
Microchip: Brushless DC Motor Control Made Easy (AN857).
L293D Datasheet.
Discover more from Simple Circuit
Subscribe to get the latest posts sent to your email.