This topic shows how to make a simple distance meter using PIC12F1822 microcontroller and HC-SR04 ultrasonic sensor.
I’m not going to write any information about the HC-SR04 ultrasonic sensor because it’s well described in its datasheet as well as the following three topics:
PIC16F84A with HC-SR04 ultrasonic sensor example
Interfacing PIC16F877A with HC-SR04 ultrasonic sensor
Interfacing PIC18F4550 Microcontroller with HC-SR04 Ultrasonic Sensor
Components List:
- PIC12F1822 Microcontroller
- HC-SR04 Ultrasonic sensor
- 1602 LCD display
- 74HC595 Shift Register
- 10K Variable Resistor
- +5V Power Source
- Breadboard
- Jumper Wires
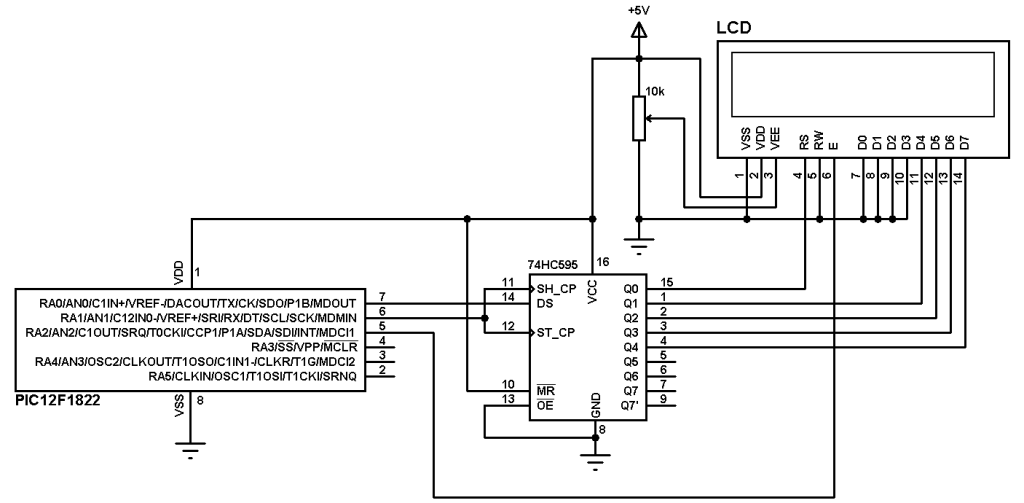
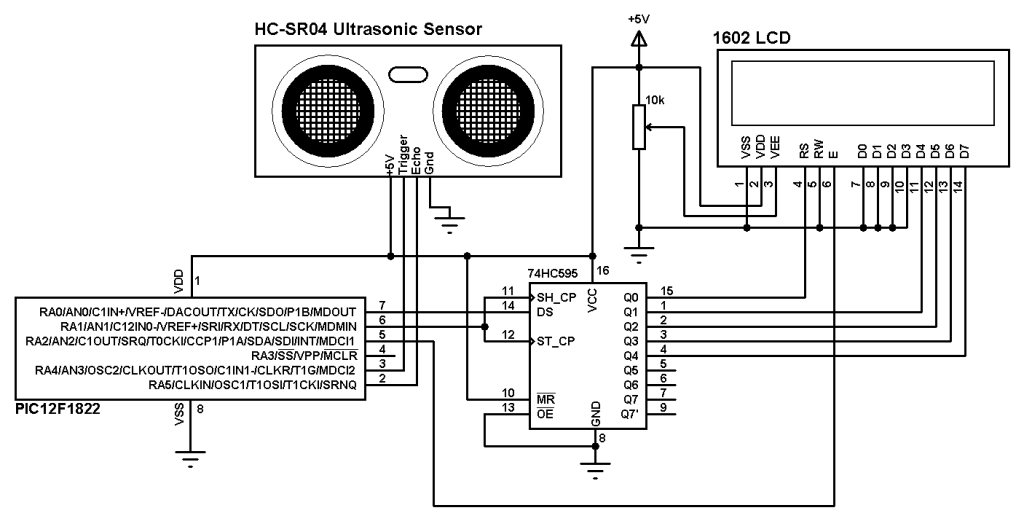
Interfacing PIC12F1822 with HC-SR04 ultrasonic sensor circuit:
This is our example circuit schematic where internal oscillator of PIC12F1822 is used.
The LCD display is used to display the distance result.
To interface 1602 LCD with PIC12F1822 microcontroller we need 74HC595 shift register as what was done in this post:
Interfacing PIC12F1822 microcontroller with LCD display
Interfacing PIC12F1822 with HC-SR04 ultrasonic sensor CCS C code:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 | // Interfacing PIC12F1822 with HC-SR04 ultrasonic sensor CCS C code // 3-Wire LCD driver must be added //LCD module connections #define LCD_DATA_PIN PIN_A0 #define LCD_CLOCK_PIN PIN_A1 #define LCD_EN_PIN PIN_A2 //End LCD module connections #include <12F1822.h> #fuses NOMCLR INTRC_IO #use delay(clock = 8000000) #include <3WireLCD.c> #use fast_io(A) unsigned int16 i, distance; int1 wait_sensor(){ i = 0; set_timer1(0); // Reset Timer1 while(!input(PIN_A5) && (i < 1000)) i = get_timer1(); // Read Timer1 and store its value in i if(i > 990) return 0; else return 1; } unsigned int16 get_distance(){ i = 0; set_timer1(0); while(input(PIN_A5) && (i < 25000)) i = get_timer1(); return i; } void main() { setup_oscillator(OSC_8MHZ); // Set internal oscillator to 8MHz setup_adc_ports(NO_ANALOGS); // Configure all pins as digital set_tris_a(0x20); // Configure RA5 pin as input lcd_initialize(); // Initialize LCD module lcd_cmd(LCD_CLEAR); // LCD Clear lcd_goto(4, 1); // Go to column 4 row 1 lcd_out("Distance:"); SETUP_TIMER_1(T1_INTERNAL | T1_DIV_BY_2); // Configure Timer 1 to increment by 1 every 1 us while(TRUE){ // Send 10us pulse to HC-SR04 Trigger pin output_high(PIN_A4); delay_us(10); output_low(PIN_A4); // Read pulse comes from HC-SR04 Echo pin if(wait_sensor()) { distance = get_distance(); if(distance > 24990) { lcd_goto(3, 2); // Go to column 3 row 2 lcd_out("Out Of Range"); } else { distance = i/58; // Calculate the distance lcd_goto(3, 2); // Go to column 3 row 2 lcd_out(" cm "); lcd_goto(6, 2); // Go to column 6 row 2 printf(lcd_out,"%3Lu",distance); } } else { lcd_goto(3, 2); // Go to column 3 row 2 lcd_out(" Time Out "); } delay_ms(100); } } |
Discover more from Simple Circuit
Subscribe to get the latest posts sent to your email.