Unipolar stepper motor drive with PIC18F4550 microcontroller

Unipolar stepper motor drive with PIC18F4550 microcontroller
After interfacing PIC18F4550 microcontroller with bipolar stepper motor in the following topic:
Bipolar stepper motor drive with PIC18F4550 and CCS C
Now let’s see how to drive a unipolar stepper motor using PIC18F4550 and CCS PIC C compiler.
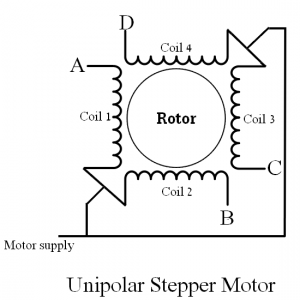
Usually the bipolar stepper motor has 2 colis and therefore it has 4 wires, and the unipolar has 4 coils which are connected as shown in the following figure:
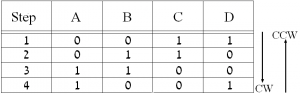
The unipolar stepper motor can be controlled in full step mode or half step mode, the usual method is the full step driving mode which gives higher torque. The following table shows driving sequences:
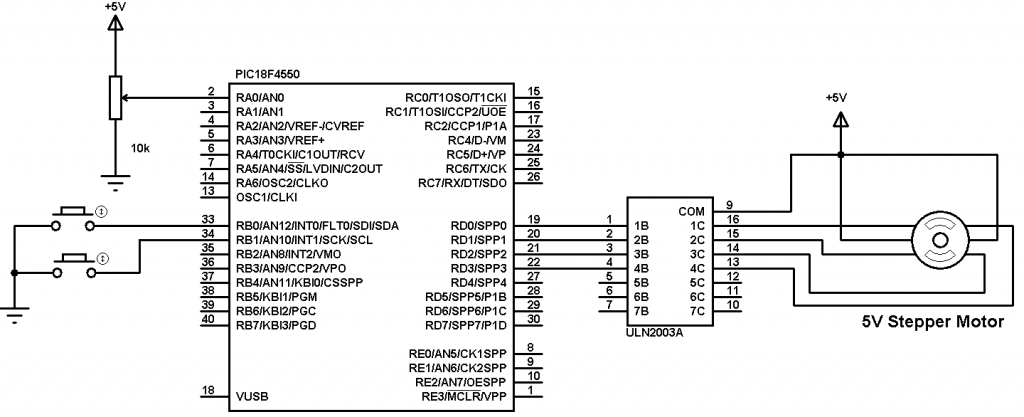
Interfacing PIC18F4550 with unipolar stepper motor circuit:
In the circuit there are 2 pushbuttons which are connected to RB0 and RB1 pins, they are used to choose motor rotation direction. PortB internal pull-ups are enabled in the software.
To control the stepper motor speed a potentiometer (10K) is used and it is connected to analog channel 0(AN0).
ULN2003 (or ULN2004) chip is used to energize the stepper motor coils.
The ULN2003(ULN2004) is a Darlington transistor array which contains seven open collector Darlington pairs with common emitters. For stepper motor controller we need 4 transistors form this chip which means 4 inputs and 4 outputs are needed.
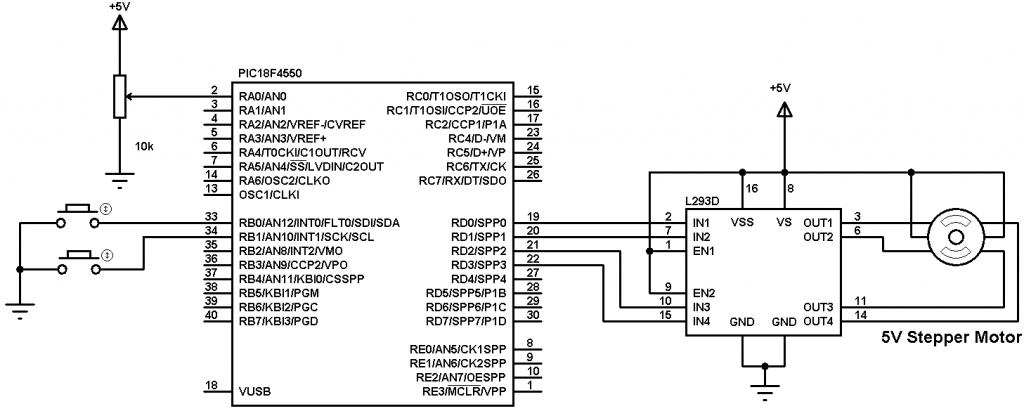
Instead of the ULN2003 chip, another chip can be used which is L293D dual H-bridge circuits as shown in the circuit schematic below.
For the L293D chip VS voltage always +5V and VSS voltage is the same as the motor voltage for example if the motor voltage is 12V, VSS should be connected to +12V power supply.
PIC18F4550 internal oscillator is used (8MHz) and MCLR pin function is disabled.
The PIC18F4550 microcontroller needs +5V between its VDD and VSS pins.
Interfacing PIC18F4550 with unipolar stepper motor CCS C code:
A pot connected to AN0 is used to control the speed of the stepper motor. The microcontroller reads the analog data from AN0 and uses the digital value to change the delay between motor driving sequences.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 | // Interfacing PIC18F4550 with unipolar stepper motor CCS C code #include <18F4550.h> #fuses NOMCLR INTRC_IO #use delay(clock = 8000000) #use fast_io(B) #use fast_io(D) unsigned int8 speed_; void main() { setup_oscillator(OSC_8MHZ); // Set internal oscillator to 8MHz setup_adc(ADC_CLOCK_DIV_8); // Set ADC conversion time to 8Tosc setup_adc_ports(AN0); // Configure RA0(AN0)as analog set_adc_channel(0); // Select channel 0 input port_b_pullups(TRUE); output_b(0); set_tris_b(3); output_d(0); set_tris_d(0); delay_ms(100); while(TRUE) { output_d(0); while( ! input(PIN_B0)) { speed_ = read_adc(); if(speed_ < 2) speed_ = 2; output_d(0b00000011); delay_ms(speed_); output_d(0b00000110); delay_ms(speed_); output_d(0b00001100); delay_ms(speed_); output_d(0b00001001); delay_ms(speed_); } while( ! input(PIN_B1)) { speed_ = read_adc(); if(speed_ < 2) speed_ = 2; output_d(0b00001001); delay_ms(speed_); output_d(0b00001100); delay_ms(speed_); output_d(0b00000110); delay_ms(speed_); output_d(0b00000011); delay_ms(speed_); } } } |
Interfacing PIC18F4550 with unipolar stepper motor video:
The following video shows project hardware circuit.
Discover more from Simple Circuit
Subscribe to get the latest posts sent to your email.